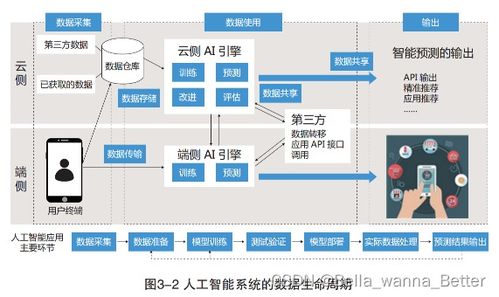
隨著人工智能技術(shù)的飛速發(fā)展,機器人技術(shù)正逐步融入我們的日常生活和工業(yè)生產(chǎn)中。機器人操作系統(tǒng)(ROS)作為機器人開發(fā)的重要平臺,其最新版本ROS 2在實時性、分布式系統(tǒng)和安全性方面有了顯著提升。結(jié)合強大的物理仿真軟件Gazebo 9,開發(fā)者可以在高度逼真的虛擬環(huán)境中進行機器人算法測試與優(yōu)化,特別是目標跟蹤這一關(guān)鍵技術(shù)。本文將以zhangrelay在CSDN博客專欄中分享的實踐經(jīng)驗為基礎(chǔ),探討如何利用ROS 2與Gazebo 9實現(xiàn)目標跟蹤,并分析其在信息技術(shù)咨詢服務(wù)領(lǐng)域的應(yīng)用前景。
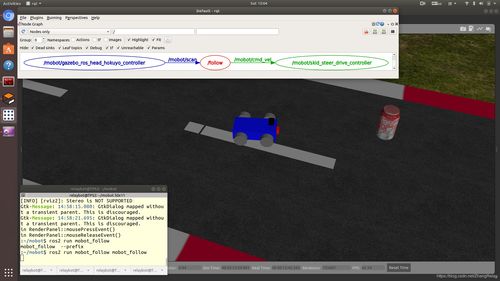
目標跟蹤是機器人感知與決策的核心環(huán)節(jié),涉及計算機視覺、傳感器融合和運動控制等多個領(lǐng)域。在ROS 2框架下,開發(fā)者可以利用其模塊化設(shè)計,輕松集成視覺處理節(jié)點(如使用OpenCV庫)和運動控制節(jié)點。Gazebo 9則提供了豐富的仿真環(huán)境,支持多種傳感器模型(如攝像頭、激光雷達)和物理引擎,使得目標跟蹤算法可以在接近真實世界的場景中進行驗證。例如,通過Gazebo 9搭建一個包含移動機器人和動態(tài)目標的仿真場景,開發(fā)者可以測試跟蹤算法的魯棒性和實時性,而無需依賴昂貴的硬件設(shè)備。
實踐過程中,首先需要配置ROS 2環(huán)境并安裝Gazebo 9插件,確保兩者能夠無縫協(xié)作。接著,設(shè)計一個簡單的目標跟蹤流程:使用Gazebo 9中的攝像頭模型捕獲環(huán)境圖像,通過ROS 2話題(Topic)將圖像數(shù)據(jù)傳輸?shù)教幚砉?jié)點,利用人工智能算法(如基于深度學(xué)習(xí)的YOLO或傳統(tǒng)圖像處理技術(shù))識別并跟蹤目標,最后輸出控制指令驅(qū)動機器人運動。zhangrelay的專欄詳細介紹了代碼實現(xiàn)步驟和常見問題解決方案,例如如何處理圖像延遲、優(yōu)化跟蹤精度等,為初學(xué)者提供了寶貴的參考。
從信息技術(shù)咨詢服務(wù)的角度來看,這種基于仿真的目標跟蹤實踐具有重要價值。咨詢服務(wù)公司可以為客戶提供定制化的機器人解決方案,通過ROS 2與Gazebo 9的仿真測試,降低開發(fā)風(fēng)險和成本。例如,在倉儲物流、安防監(jiān)控或智能家居領(lǐng)域,目標跟蹤技術(shù)能提升機器人的自主導(dǎo)航和交互能力。咨詢服務(wù)還可以涵蓋系統(tǒng)集成、性能優(yōu)化和培訓(xùn)支持,幫助客戶快速部署人工智能驅(qū)動的機器人系統(tǒng)。隨著ROS 2生態(tài)的完善和Gazebo仿真能力的增強,目標跟蹤技術(shù)將在更多行業(yè)中得到應(yīng)用,推動自動化與智能化轉(zhuǎn)型。
ROS 2與Gazebo 9為目標跟蹤實踐提供了強大工具,結(jié)合人工智能算法,開發(fā)者能夠構(gòu)建高效的機器人系統(tǒng)。通過借鑒像zhangrelay這樣的技術(shù)分享,信息技術(shù)咨詢服務(wù)可以更好地服務(wù)于創(chuàng)新項目,促進技術(shù)落地與產(chǎn)業(yè)升級。